
 One Wheel From Two
One Wheel From Two
If you can't afford a One Wheel like those grad students outside CIC who let you ride it, just convert a hoverboard!
One Wheel From Two
13 Feb 2022, 2:06 p.m. EST
Day 5: Created motor and battery wire harnesses, improved axle mounts and ran first big test which just made a lot of scary noises. (turns out BOTH bearings are necessary).
One Wheel From Two
22 Jan 2022, 10:41 p.m. EST
Day 1: Picked up parts and fully disassembled hoverboard (after some nerve-racking riding around techspark). We removed mounting brackets and attempted unsuccessfully to bolt together the two hubs.
One Wheel From Two
13 Feb 2022, 2:06 p.m. EST
Day 2.5: Completed full tire assembly and developed frame design sketches based on collected measurements from tire assembly.
One Wheel From Two
13 Feb 2022, 2:05 p.m. EST
Day 3: Short day, Continued frame design, 3d printed non-fitting hub supports far too many times out of PLA until we discovered the magic of flexible TPU 95.
One Wheel From Two
13 Feb 2022, 2:06 p.m. EST
Day 4: Frame day, ditched C-channel and used 80/20 aluminum extrusion instead to build first prototype frame with footboards.
One Wheel From Two
13 Feb 2022, 2:07 p.m. EST
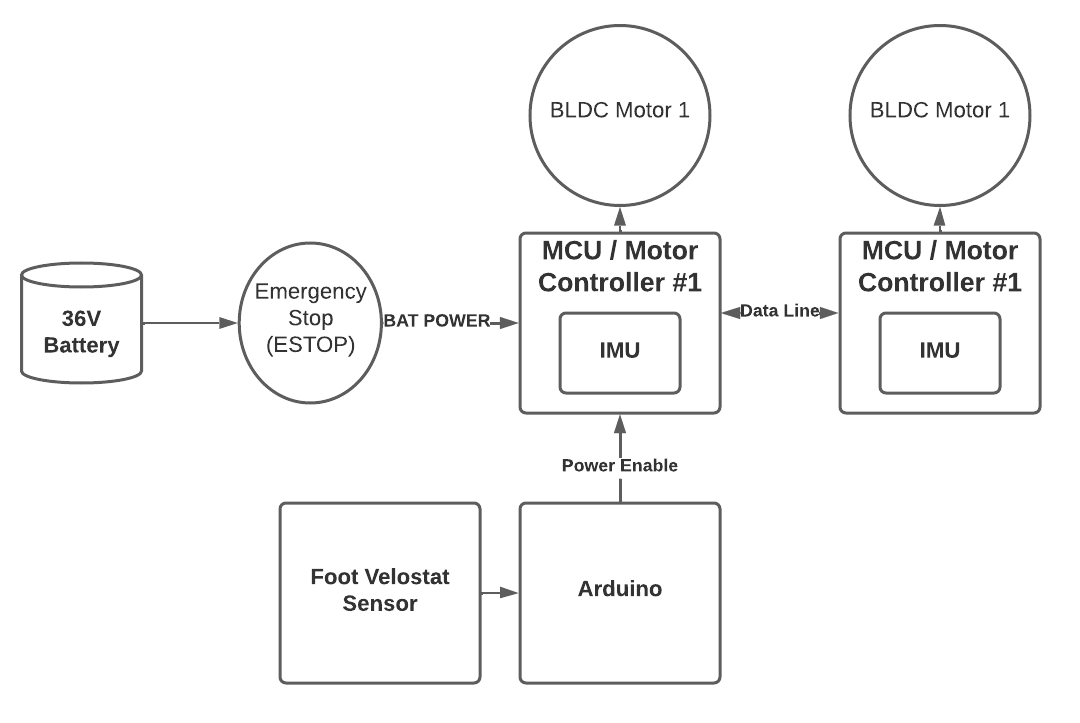
Day 6: Discovered a unique challenge to combining 2 wheels into 1: aligning the BLDC motor magnets. Initially the magnets were misaligned by 4 degrees, which is exactly half the width of a magnet, resulting in out-of-phase signals to the motors from each controller that prevented the motors from turning synchronously! After realigning both the magnets and hall-effect sensors, we noticed a much smoother operation.
One Wheel From Two
13 Feb 2022, 2:07 p.m. EST
Day 7: A great tragedy struck, we tested replacement board, which was broken from the start ;( and also fried the 2 sideboards from the initial parts list. ESD safety should not be taken lightly!
One Wheel From Two
13 Feb 2022, 12:39 p.m. EST
Day 2: Discovered that the stator is removable, so we achieved the priority milestone of making one wheel from two and its only downhill from this point on.